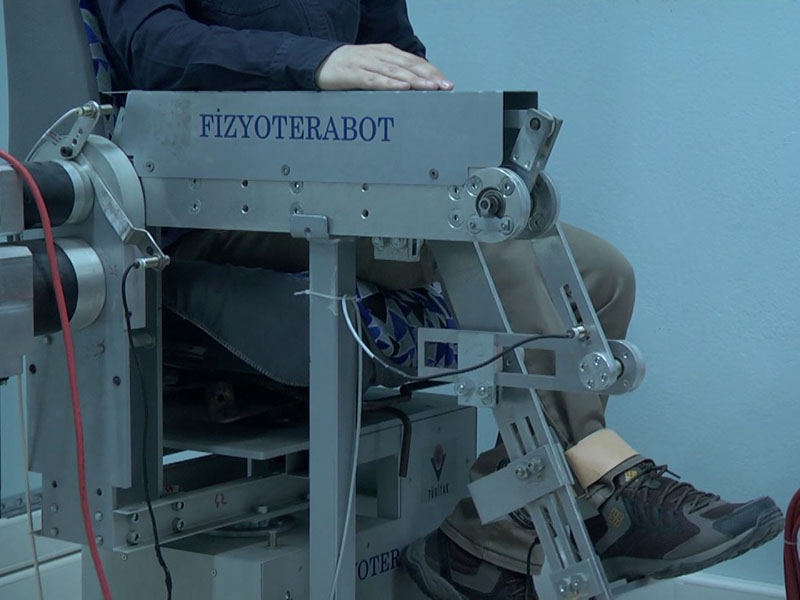
PHYSIOTHERABOT™


Project details
-
Date
July 31, 2007
- Category
Project number :
104M018
Grant :
THE SCIENTIFIC AND TECHNOLOGICAL RESEARCH COUNCIL OF TURKEY (TUBITAK - 1001)
Aim:
This project is related to design and control of a three degrees of freedom therapeutic exercise robot ( PHYSIOTHERABOT™ ) for upper and lower limbs of patient who need rehabilitation after the spinal cord injury (SCI), stroke, muscle disorder, and surgical operation. In order to control this robot, a “Human-Machine Interface” with a rule-based control structure was developed. The robot manipulator (RM) can perform all active and passive exercises as well as learn specific exercise motions and perform them without the physiotherapist (PT) through the human-machine interface. Furthermore, if a patient reacts against the robot manipulator during the exercise, the robot manipulator can change the position according to feedback data. Thus, the robot manipulator can serve as both therapeutic exercise equipment and as a physiotherapist in terms of motion capability.