Ankle Rehabilitation Robot
Project details
-
Date
January 17, 2022
- Category
Project number:
FCD-2020-3900
Grant:
YILDIZ TEKNİK ÜNİVERSİTESİ BİLİMSEL ARAŞTIRMA PROJELERİ KOORDİNASYON BİRİMİ
Aim:
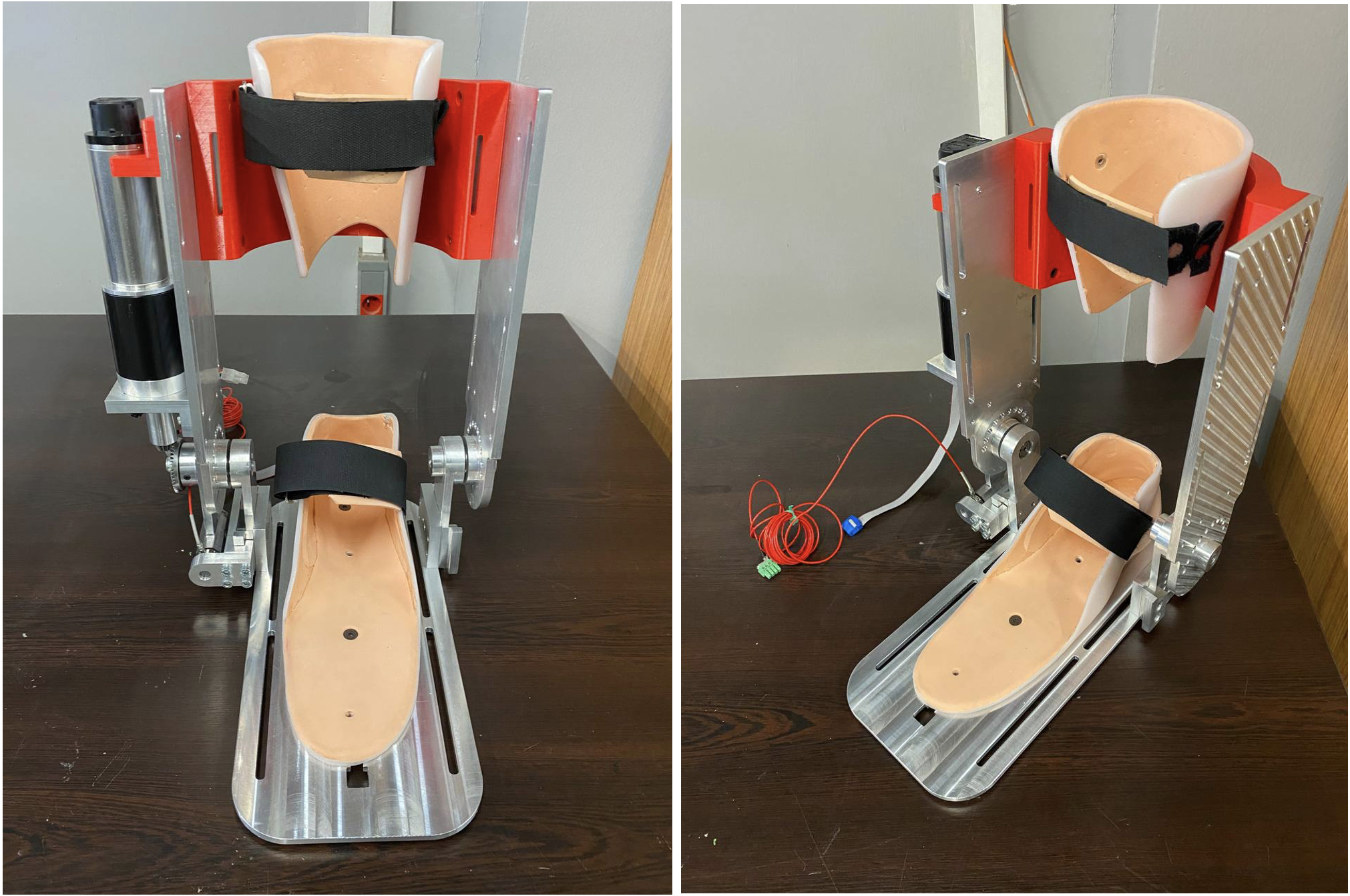
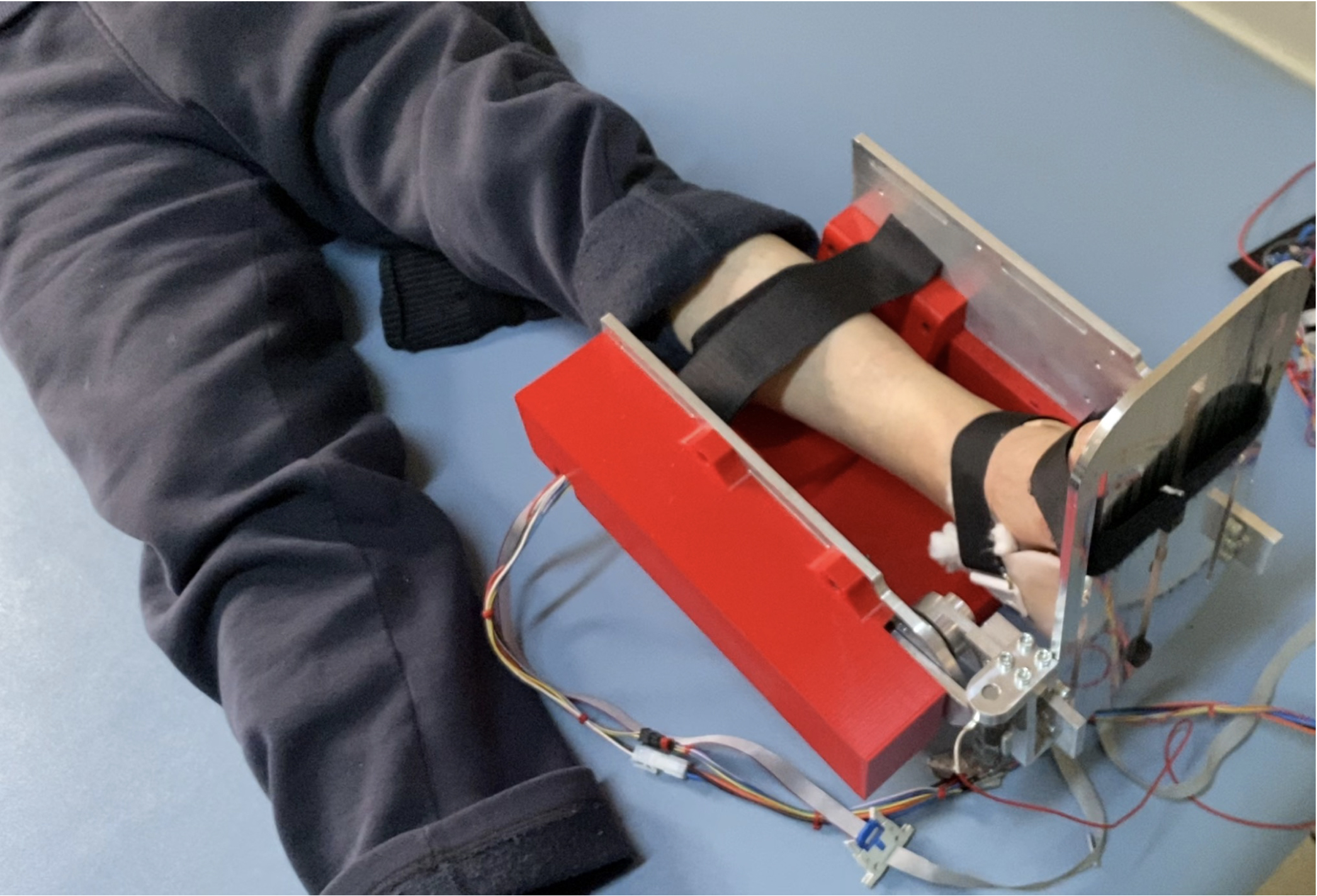
It is developed a portable and compact robotic rehabilitation system for the ankle which provides effective and safe human-robot interaction to assist doctors and physiotherapists. In this context, it is realized that design, production, and control of a robotic system that can measure biomechanical parameters (range of motion and torque of the ankle) sensitively, apply passive stretching which is a type of therapeutic exercise by using hybrid impedance control method.
Passive stretching exercise is modeled with the support of physical therapy and rehabilitation experts and doctors and it is shown that passive stretching exercise, which is manually applied by physiotherapists in the clinic, can be applied by the developed robotic system.
The contribution of this study to the literature is the ability to perform ankle physical therapy and rehabilitation with a portable and compact robotic mechanism that uses hybrid impedance control method with a control algorithm modeling the manual therapeutic exercises performed by physiotherapists.
FCD-2020-3900
Grant:
YILDIZ TEKNİK ÜNİVERSİTESİ BİLİMSEL ARAŞTIRMA PROJELERİ KOORDİNASYON BİRİMİ
Aim:
It is developed a portable and compact robotic rehabilitation system for the ankle which provides effective and safe human-robot interaction to assist doctors and physiotherapists. In this context, it is realized that design, production, and control of a robotic system that can measure biomechanical parameters (range of motion and torque of the ankle) sensitively, apply passive stretching which is a type of therapeutic exercise by using hybrid impedance control method.
Passive stretching exercise is modeled with the support of physical therapy and rehabilitation experts and doctors and it is shown that passive stretching exercise, which is manually applied by physiotherapists in the clinic, can be applied by the developed robotic system.
The contribution of this study to the literature is the ability to perform ankle physical therapy and rehabilitation with a portable and compact robotic mechanism that uses hybrid impedance control method with a control algorithm modeling the manual therapeutic exercises performed by physiotherapists.